

| Projet multixwii quad X |
| Écrit par 14frs1525 alias peuch88 |
| Vendredi, 27 Janvier 2012 06:20 |
Navigation
Projet MultiWiiCopter Quad X a base Arduino
– Intro – Liste des composants utilisés dans un premier temps – Début de montage (en fonction de la livraison des composants) – Changement de programme (abandon du Wii Motion+ et du Nunchuck pour une 10DOF LLC) – Construction de la carte de controle – Upload du MultiWii 1.9 dans l’Arduino – Modifications suites aux essais – modifications suite a ces essais – Installation et paramétrage du module bluetooth – Affinage du mode stable+ élimination des vibrations
janvier 2012étant étonné les possibilités offertes par les cartes Arduino, je tente de me fabriquer un Quadricopter X je n’ai aucune notion de pilotage ni de modélisme , cependant j’ai quelques bonnes aptitudes en l’électronique , mécanique et programmation on trouve pas mal d’info sur le net avec beaucoup de projet ayant aboutis
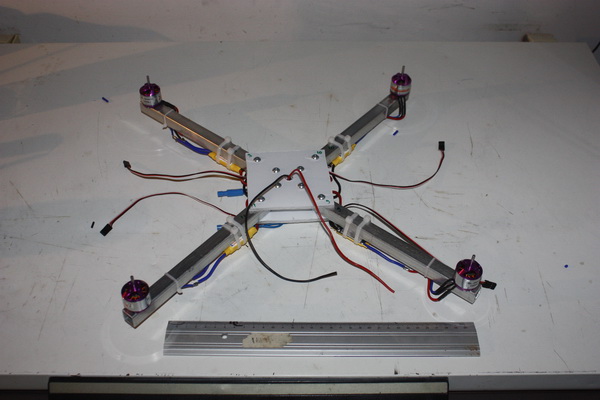
constitué de 4 profilés alu de 15x15mm de 250 mm de long (recup antennes tv) pris en sandwich par 2 plaques de polycarbonate de 100X100 mm (chutes récupérées)
le reste des composant commandé sur :Ebay,rc timer,hobbyking,lextronic
liste des composants et caractéristiques
4 moteurs brusless (rctimer) Model: A2830-11
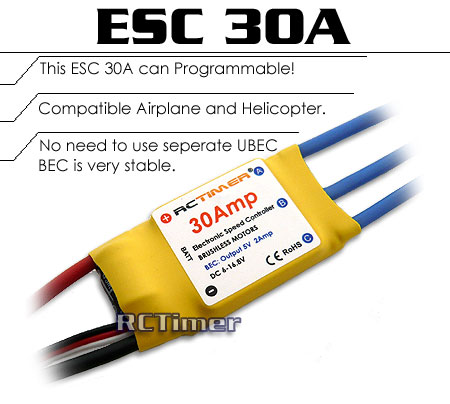
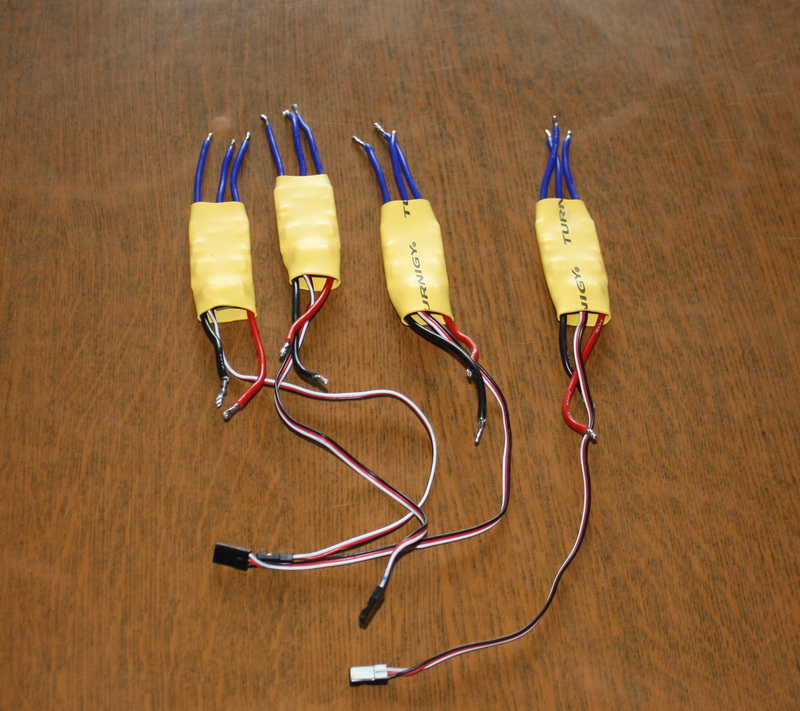
4 RCTimer ESC 30A Brushless Motor Speed Controller Hobbywing’s Program Input voltage:DC 6-16.8V(2-4S Lixx) Programmable Items
2 lots d’helices (certainement risques de casse pendant les essais) 3 x 9×5 Propeller Standard 22.86 cm x 12.7 cm
5 Prop saver kit (pour essayer de ne pas détruire les hélices )
voila pour la partie propulsion !
passons maintenant au cœur du système
Electronique de contrôle
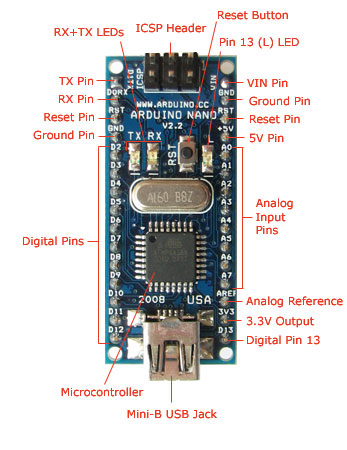
j’ai opté pour l’Arduino nano v3 pour sa facilité d’utilisation qui aura pour rôle de Gérer la stabilité de l’appareil en vol ceci avec quelques capteurs Gyroscope 3 axes, accéléromètre, Baromètre pour régler quelques paramètres en vol et contrôler les capteurs , je vais installer un module bluetooth sur la liaison série de l’Arduino (portée 10 mètres)
L’énergie
j’ai commandé 2 batteries LiPo de 2200Mah
La radiocommande low cost
toujours pas dispo chez Hobby king ça risque d’etre long
27/01/2012
Je viens de recevoir les moteurs et les ESCbilan de cette journée montage des moteurs
Branchement des ESC
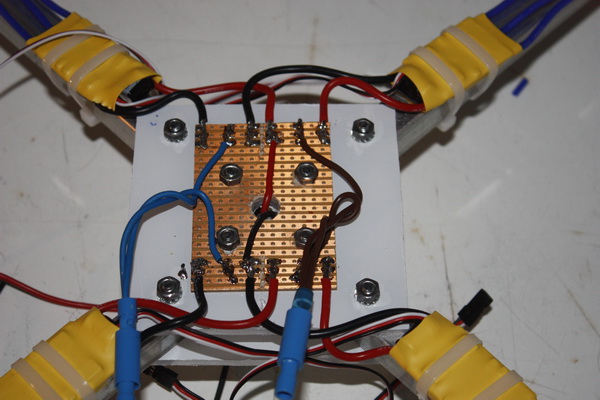
détails de la partie alimentation
Jusque la pas de difficultés particulières d’après les plans trouvé sur le net
28/01/2012
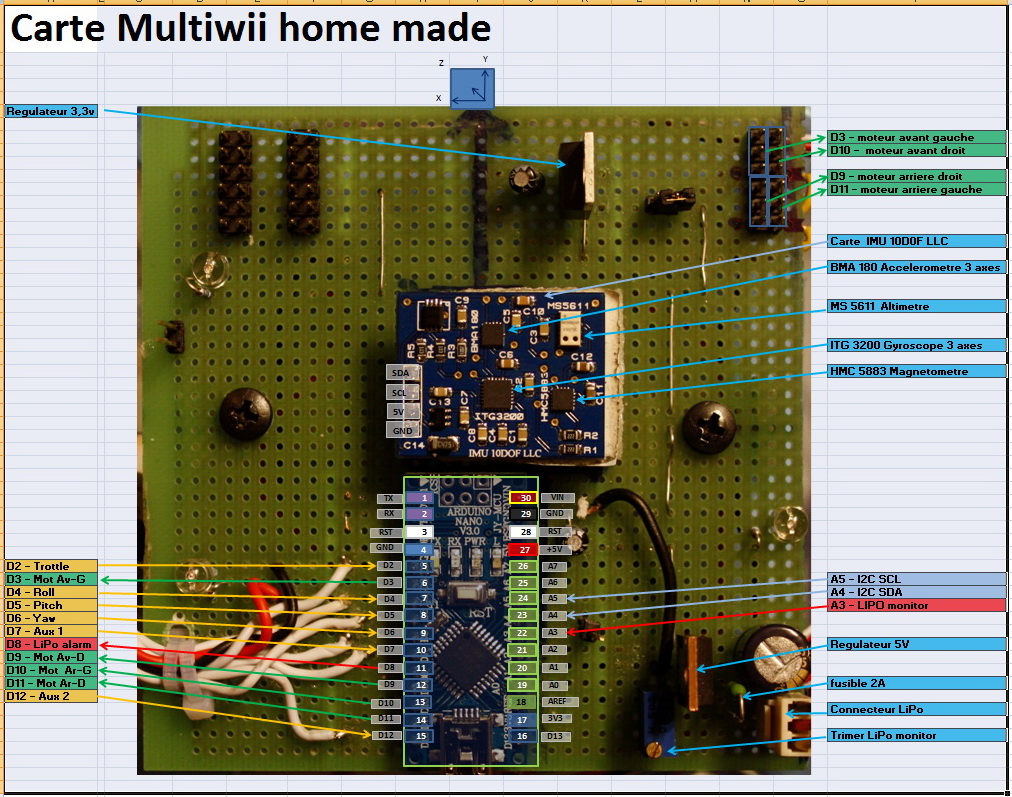
Changement de programme, après réflexion, les composants Wii motion plus,nunchuck,convertisseur et baromètre font un peut usine a gaz a câblerj’ai pas pu résister a l’achat de la carte IMU 10DOF LLC – ITG3200 + BMA180 + HMC5883 + MS5611 + LLCLe gyro ITG-3200 dispose de trois convertisseurs (ADC) 16-bit analogique-numérique pour la numérisation des sorties du gyroscope. L’utilisateur peut configurer le filtre passe-bas de la bande passante fourni en interne ainsi que la vitesse du bus I2C (mode rapide400kHz). InvenSense a conçu l’ITG-3200 pour que la taille du capteur soit révolutionnaire avec un encombrement de 4x4x0.9mm (QFN), tout en offrant les meilleures performances, moins de bruit, et pour des appareils électronique grand public. L’accéléromètre BMA180 de chez Bosch est un capteur triaxiale numérique ultra hautes performances, et vise le marché des applications à faible consommation de puissance. Le capteur BMA180 permet la mesure précise des accélérations dans les trois axes perpendiculaires, et par conséquent détecte le sens d’inclinaison, le mouvement, chocs et vibrations dans les téléphones cellulaires, ordinateurs de poche, des périphériques informatiques, interfaces homme-machine, dans la réalité virtuelle et contrôleurs de jeu. Le magnétomètre HMC5883L Honeywell est un module conçu pour la détection de faibles champs magnétiques avec une interface numérique pour des applications low-cost telles que l’orientation et la magnétométrie. Le HMC5883L comprend un capteur magnéto-résistifs haute résolution HMC118X, un système d’amplification ASIC, l’annulation de l’offset, et un ADC 12 bits qui permet une précision de 1° à 2° pour une boussole. et fiables dans l’industrie. Le MS5611-01BA est un altimètre haute résolution de nouvelle génération avec un bus SPI et I2C. Il est optimisé pour les altimètres et les variomètres avec une résolution de 10 cm d’altitude. Le module capteur comprend un capteur de pression haute linéarité et un convertisseur analogique numérique 24 bits avec des coefficients d’usine interne étalonnée. Il fournit une précision de pression numérique 24 bits et la valeur de température et de différents modes de fonctionnement qui permettent à l’utilisateur d’optimiser la vitesse de conversion et de consommation. LLC convertisseur TTL/CMOS intégré
70€ port compris
j’ai déjà reçu ma carte IMU 10DOF LLC vue d’ensemble en PDF cliquez ici
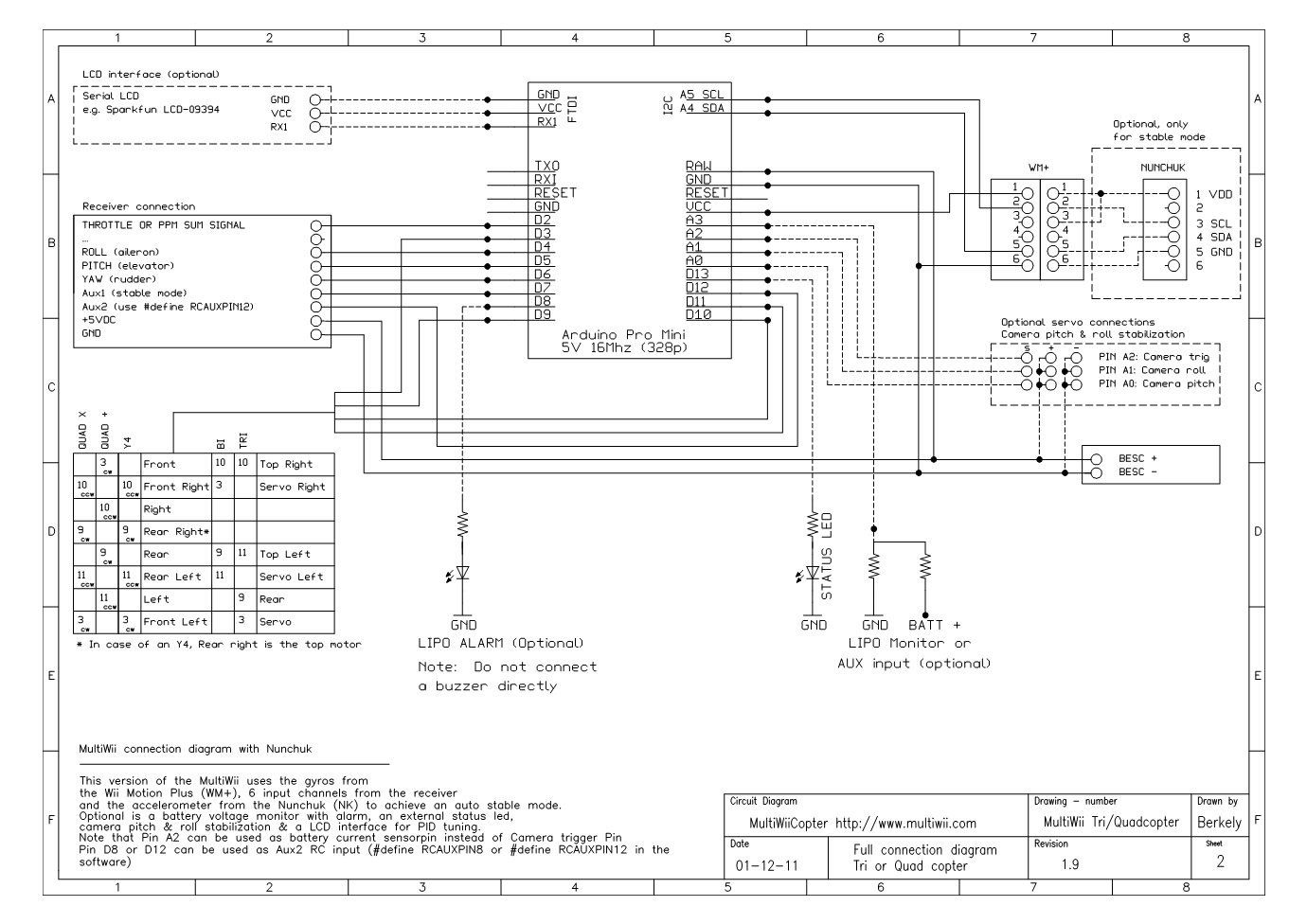
Plans Schémas
Schémas de base (Taille réelle)
J’ai enfin tous le matériel pour commencer a paramétrer j’ai fait mes 1ers debuggage ce WEEK END, il y en avais pas mal a commencer par l’Arduino (de chine ) les PIN A0 a A7 sont inversées ! ???? puis quelques débordement de soudures entre les pistes rendait la carte inutilisable enfin bref un long boulot de contrôle
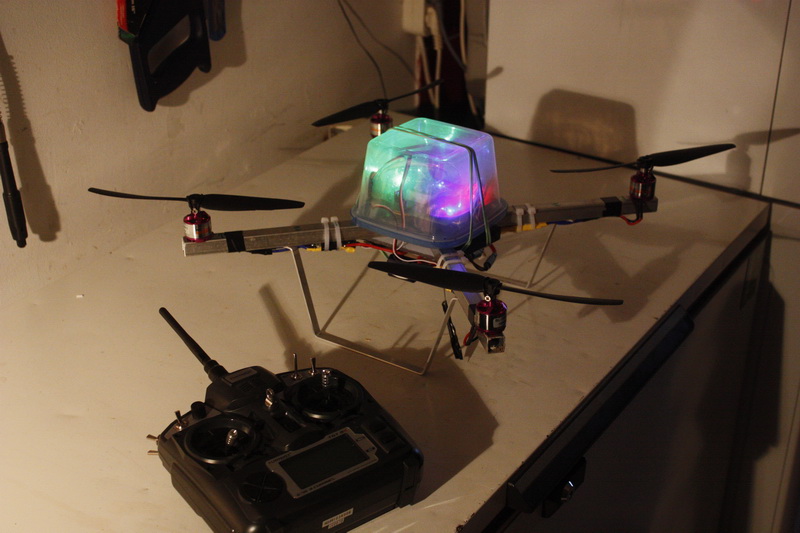
La bestiole en images
poid total avec sa batterie 1,075 KG Étalonnage des ESC (indispensable) je me suis fait un adaptateur pour étalonner les 4 esc en même temps
Important ! régler les end-point de la voie throttle a 100% , démonter les hélices pour éviter tous risques se brancher sur la voie 3 puis brancher les 4 ESC puis la batterie (ou les faire un par un si vous n’avez pas d »adaptateur mettre en route la radio avec les gaz a fond attendre le bip puis réduire les gaz a zéro , vos ESC sont calibré
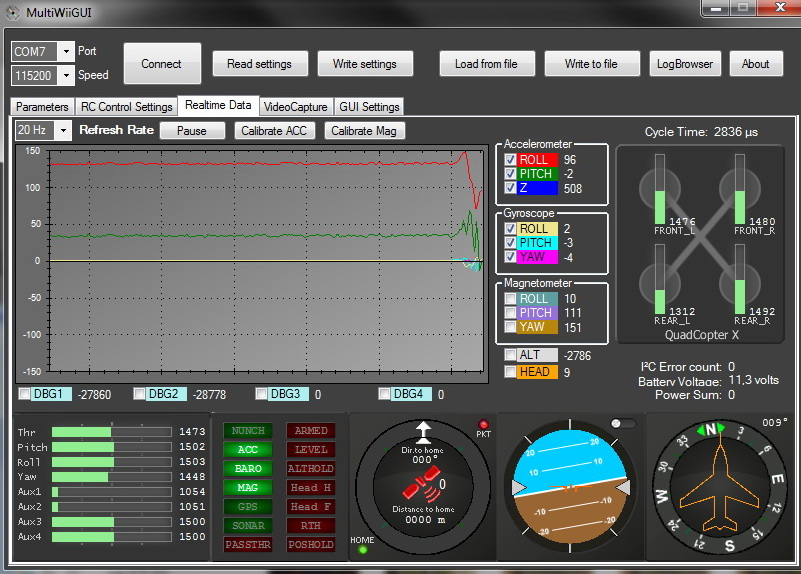
Programmation de l’Arduino avec le soft Multiwii 1.9 télécharger la dernière version de l’Arduino soft, pour moi ce sera la V 0.23 pour windows Télécharger le soft Multiwii V 1.9 , d’autres versions sont en développement et multiwiiconfig
Win GUI, programme alternatif au multiwiiconfig ce que j’utilise
Hoppla après 3 décollage 3 crash et 4 hélices HS pour 1 minute de vol sa coûte cher la mise au point enfin aujourd’hui j’ai retenté le coup a un endroit plus spacieux et ses petites protections pour les hélice ce qui fait que j’ai volé plus de 5 minutes sans casse, pour finir par planter le bouzin en terre a la moitié dune pale
comme je l’explique plus haut, je n’en trave pas une en pilotage
donc je prépare une nouvelle version pour novice (antichoc), avec des bras plus long , et un train d’aterissage plus costaud , le but ne plus casser d’hélices, et compenser le poids par des matériaux plus légers
Version 1 de mon quad
Version 2 de mon quad X, et premieres impressions
premiers essais en vol sur une surface réduite « Merci a Pouty pour ces photos «
Démonstration en micro vol je n’ai pas assez d’espace la ou je fais mes essais 10mX10m en mode stable Gyro,acc,level,mag pendant 5 minutes et sans casses
cette version est améliorée par rapport a la 1ere au niveau de l’envergure des bras, qui protégé les hélices la carte IMU 10DOF LLC etait collée avec du double face sur une mousse qui avait tendance a se décollée (accentuation des vibrations), j’ai donc replacé cette mousse amortissante par un mousse moins épaisse et plus adherante les moteur sont fixé solidement et en utilisant des joints toriques entre moteurs et bras pour amortir les éventuelles vibrations mousses pour amortir les chocs a l’atterrissage , et suppression du train d’atterrissage
poid total de la bête 1,150 kg j’ai encore de la marge, reste a alléger la structure sans pour autant l’affaiblir
me reste a faire des essais et des réglages sur un terrain plus vaste car comme je l’explique ci-dessus, je suis une brèle en pilotage
comme promis une ch’tite video
on vois bien sur ces vidéos qu’il y a encore du boulot pour régler les problèmes de stabilité, je n’avais pas programmé les¨PID du magnétomètre ce que l’on ne vois pas s’est le crash (perte d’une hélice en plein vol) , je suis retourné au bonne vielle pinces livrées avec mes moteurs après avoir coupé les arbres de moitié
14 mars 2012
ajout de protection avec des frites de piscine, car loin d’être stable un essais de plus ma compagne l’a perdu de vue, il était très haut
vol plus prés du sol
vidéos embarquées plus tard ! !
31/mars/2012 après avoir changé de modèle d’helices 10 x 4.5 , et reprogrammer l’Arduino avec la dernière version du MultiWii v2.0 une petite vidéo faite ce jour avec du vent a 15Km/h après ces premiers test , une bonne impression de ce soft , cependant il m’est difficile de faire en sorte que l’appareil garde le cap les moteurs ne démarrent pas forcement a tous les coups donc en regardant la vidéo on voit qu’il a fallu que je m’y reprenne a 3 fois pour que tous les moteurs démarrent on vois aussi que le cap change régulièrement sans que je touche a la commande de lacet ET POURTANT IL VOLE oui il vole, mais mal ! son comportement en vol est parfois stable et parfois instable, je viens de découvrir le pourquoi du comment Les contrôleurs ESC de chez rctimer ne supporte pas la transmission en 400hz , de plus a partir de 50% de vitesse le ESC boost , la courbe des gaz n’est pas linéaire ce qui explique les instabilités de l’appareil il me faut donc Flasher le firmware de ces contrôleurs toutes les infos sont disponible ici 03/04/2011 en attendant de reprogrammer mes ESC je fais m’attaquer aux vibrations a la source j’utilise les pinces adaptatrice fournies avec les moteurs car j’ai essayé les prop saver qui ne sont pas vraiment top (perte d’hélices en vol) probleme 1 les hélices facile a équilibrer au niveau du poids des pales avec de l’adhésif, cependant les kit d'adaptation au diamètre laisse un peut de jeu ce qui favorise une excentration mieux vaut prendre un diamètre inférieur et le percer au diamètre choisis quitte a forcer un peut probleme 2 dans mon cas les axes moteurs les axes sont trop long au moindre choc on risque de le tordre , il faut donc les recouper pour que l'adaptateur soit en contact avec la base de l'axe quand on a résolu le problème 2 ont se retrouve avec le problème 3 problème 3 la mise en contact de la pince avec l'embase de l'axe pose problèmes avec quelques moteurs, en tournant les hélices a la main on vois que ça tourne comme une patate pour cela il faudra limer la partie extérieur du cône pour que seul la partie intérieur soit en contact je compte modifier pas mal de choses sur ce quad, il passera a la version Peuch 3.0 25/04/2012 j’ai reçu mon convertisseur usbasp pour flasher mes ESC 5€ chez hobbyking je me suis inspiré de ce tuto pour flasher http://achetechinois.xooit.fr/t747-Flashage-des-ESC-RC-Timer-10A-et-30-A-en-400-Mhz.htm
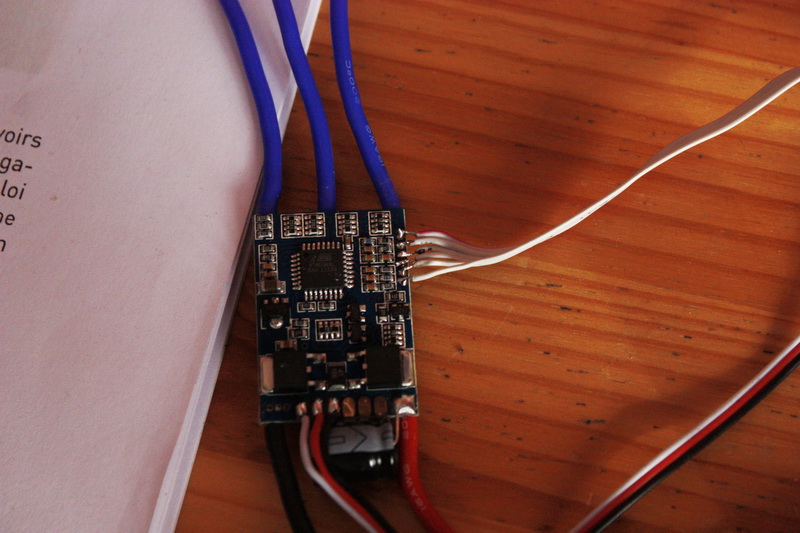
soudage des points MOSI MISO RST SCK GND VCC puis flashage avec le fichier tgy.hex contenu dans ce zip https://github.com/downloads/sim-/tgy/tgy_2012-03-21_6af38a2.zip
Cuisson au four 120°C pendant 1 a 2 min pour le Thermorétractable
Hoppla ! il sont a point
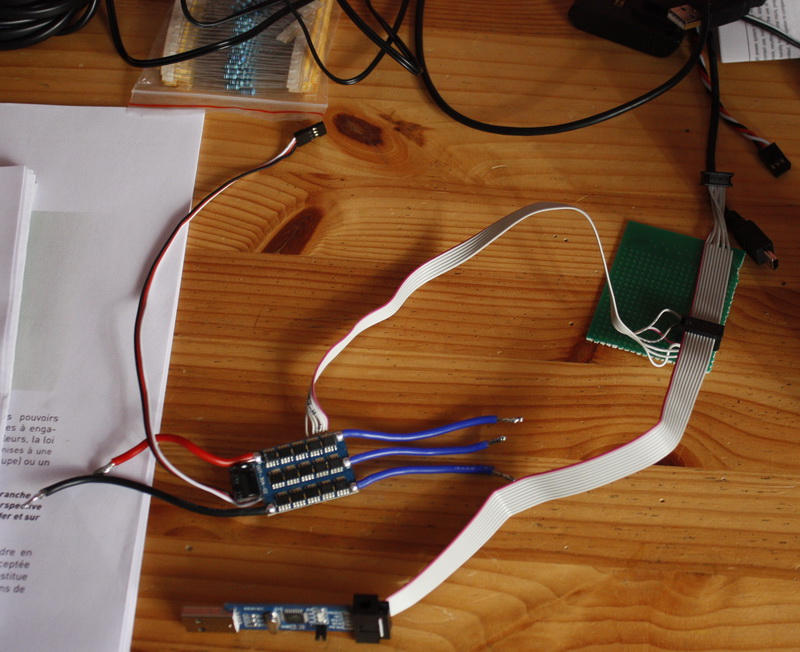
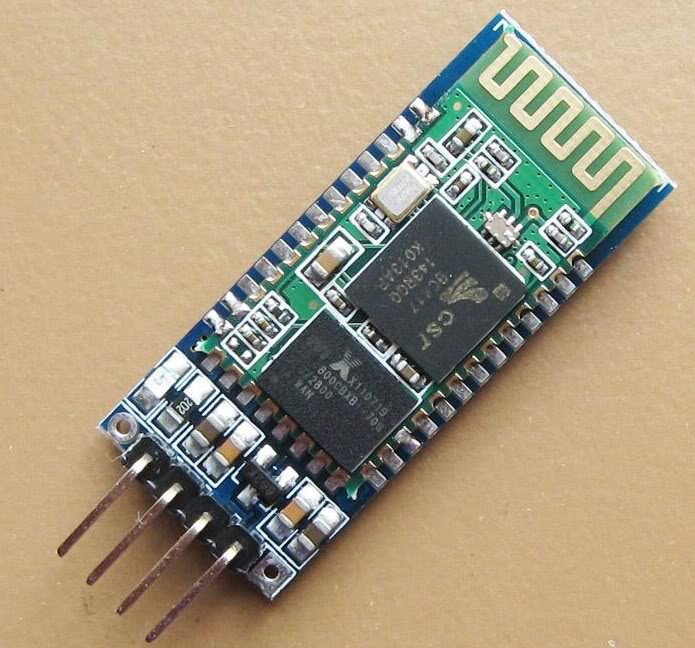
remontage puis essais sans les hélices : visiblement ça a l’aire de mieux fonctionner, la courbe d’acceleration est maintenant linéaire, les moteur ne font plus de clics mais comme il fait mauvais dehors je vais tenter l’installation du module bluetooth
bon s’est pas gagné, car il est paramétré a 9600 Baud et l’Arduino lui es paramétré a 115200 baud on peut utiliser un usbasp fdti, ca tombe bien j’en ai un, mais pas de bol je n’ai pas TX RX dessus je pense utiliser l’Arduino pour le faire Procédure : brancher le module sur l’Arduino vcc sur 5v GND sur GND RX sur D3 TX sur D2 télécharger la librairie NewSoftSerial (http://arduiniana.org/NewSoftSerial/NewSoftSerial12.zip) ensuite créer un nouveau sketch avec le soft Arduino et y copier ceci //************************************************************************ #include <NewSoftSerial.h> NewSoftSerial mySerial(2, 3); void setup() mySerial.begin(115200); } void loop() }
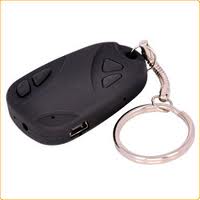
il ne me reste plus qu’a uploader l’arduino avec le multiwi2.0 rebrancher les pattes TX du module sur RX de l’arduino et RX sur TX essais apres avoir appairé le module au pc puis lancement du multiwiiconfig , et la ! miracle ca fonctionne 27/04/2012 j’ai fait des essais en vol aujourd’hui est il faut avouer qu’il est super stable par rapport a avant il tiens bien le stationnaire, par contre j’ai des doutes sur l’altitude hold je ferais de nouveau des essais demain avec la caméra embarqué si le temps le permet installation d’une micro camera HD
comme promis les vidéos encore du réglage a faire ,et comme a camera a une lentille liquide, les vibrations font des vagues dans l’image Passage en Hélices tripales de 10X6 + début de mise au point (vidéo ci-dessous)
28 mai 2012 Version multiwii 2.0 alexmos 0.23 la gestion de l’altimètre a l’air efficace ça commence a parler correctement, très satisfait du résultat malgré quelques hic a résoudre, je suis prêt du but
|
























{kind=link}
Bonjour ami Jean-Claude
nous avons fait QSO SSTV sur 27.700 ce jour, et je vois que nous avons les mm passion.
J’ai un multirotor de chez Hubsan, donc moins de mérite… un Hubsan X4 H501S,
Merci du contact et félicitation pour la réalisation du Multi
73s
Bonjour Jean Paul,
je te souhaite un bon amusement avec ce multirotor
@plus sur la fréquence